
Спутниковые навигационные системы
Опубликовано: 15.11.2018
 В настоящее время активно эксплуатируются спутниковые навигационные системы GPS и Глонасс. Американская Global Positioning System (GPS) развилась из навигационной системы NAVSTAR и начала функционировать в 70-х годах, первоначально имея исключительно военное применение.
В настоящее время активно эксплуатируются спутниковые навигационные системы GPS и Глонасс. Американская Global Positioning System (GPS) развилась из навигационной системы NAVSTAR и начала функционировать в 70-х годах, первоначально имея исключительно военное применение.
Параллельно в СССР развивалась глобальная навигационная спутниковая система (Глонасс). Принцип действия и характеристики обеих систем примерно одинаковы. Обе эти системы являются государственными и контролируются военными ведомствами.
Системы GPS и Глонасс составляют основу существующей Глобальной навигационной спутниковой системы (ГНСС), Global Navigation Satellite System (GNSS). ГНСС является спутниковой системой для многоцелевого использования для определения местоположения, времени и скорости по всему миру.
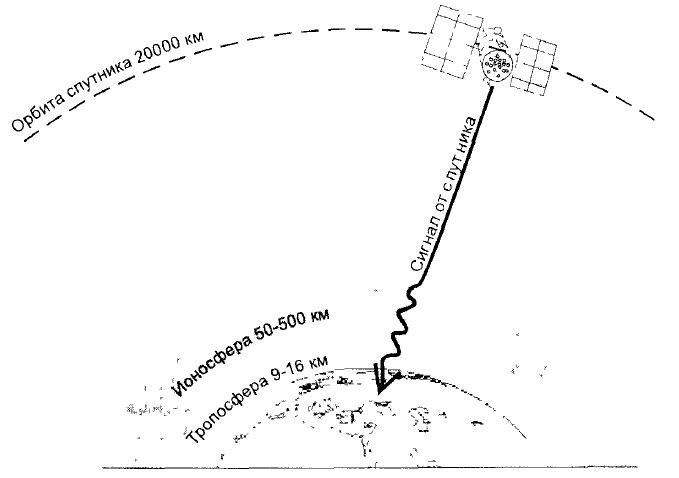
Она включает приемники пользователей, одно или более созвездий спутников, наземные сегменты и инфраструктуру управления. ГНСС постоянно развивается и совершенствуется. В Резолюции ИМО А.860(20) 1997 года разработаны морские требования к будущей ГНСС.Работа спутниковых навигационных систем основана на использовании среднеорбитальных спутников на круговых орбитах высотой примерно 20000 км. В GPS имеется 24 спутника на шести орбитах по 4 спутника на каждой, а в Глонасс - 24 спутника на четырех орбитах по 6 спутников на орбите.
Принцип измерения координат в GNSS
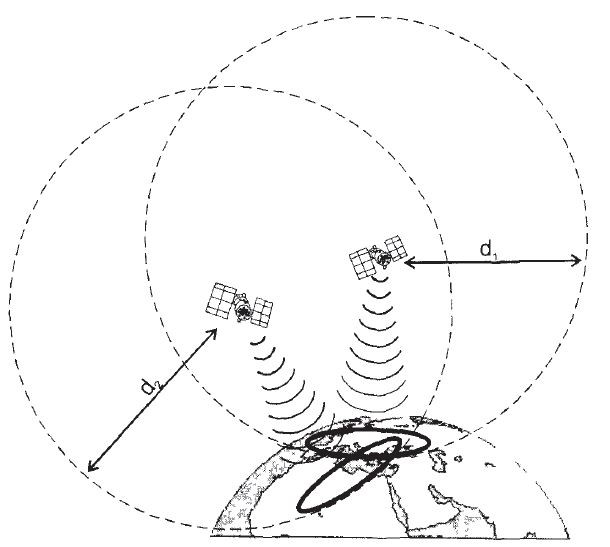
Принцип определения координат основан на измерении задержки распространения радиоволн от спутника до навигационного приемника. Спутник постоянно передает радиосигнал, содержащий точное время и положение спутника в пространстве. Приемник измеряет задержку распространения радиосигнала Δt1, что позволяет вычислить так называемое псевдорасстояние до спутника d1=cΔt1,
где c - скорость света (см. рис. 30.1). Линия пересечения сферы радиусом d1 с центром в точке положения спутника с поверхностью Земли,а это будет окружность, даст совокупность возможных положений приемника.
Если таким же образом измерить задержку радиосигнала At? от второго спутника и построить сферу радиусом d2=cΔt2, то можно получить вторую окружность возможных положений при обсервации второго спутника.
Пересечение этих окружностей даст две точки возможных положений приемника на поверхности Земли. Для устранения неоднозначности требуется обсервация третьего спутника.В GNSS для передач данных спутниками используются два частотных поддиапазона. L1 и L2. В GPS все спутники передают на одной паре частот fL1=1575,42 МГц и fL2=1227,60 MГu. В Глонасс каждый спутник передает на своей паре частот в диапазонах fL1 = 1502,5625-1615,5 МГц и fL2= 1246,4375-1256,5 МГц.
Для разделения сигналов от разных спутников и использования на спутниках передатчиков сравнительно малой мощности применяются так называемые сложные сигналы в виде псевдослучайных последовательностей (ПСП) с большим периодом повторения. Для таких сигналов информационная "единица" данных представляется некоторой псевдослучайной последовательностью с гораздо большей тактовой частотой, а "ноль" - соответственно ее инверсным значением. В результате ширина спектра сигнала многократно расширяется.
Такой способ позволяет принимать сигнал от спутника при отношении сигнал/шум значительно меньше единицы за счет накопления энергии полезного сигнала в приемнике. Однако, при этом необходимо знание этой псевдослучайной последовательности или кода. Без точного знания кода невозможно осуществить демодуляцию принимаемого сигнала.
В системе GPS есть два кода - короткий (С/А-код) для коммерческого применения и длинный (Р-код) для военных целей. С 1 мая 2000 года американская сторона рассекретила Р-код из-за того, что Российская Глонасс позволяла получить такую же точность. В Глонасс точный код не засекречен и постоянно может быть использован в гражданских целях. Горизонтальная погрешность определения местоположения спутниковых навигационных систем Глонасс и GPS в штатном режиме не превышает 33 метров с вероятностью 95%. В остальных 5% случаев абсолютная погрешность не превышает 100 метров.
В дифференциальном режиме погрешность составляет не более 10 метров с вероятностью 95%. Совместное использование GPS/Глонасс позволяет получить более высокую точность. Известно, что из-за различия в углах наклонения орбит спутников Гтонасс дает лучшие точностные характеристики в высоких шиpoтax, a GPS - в средних широтах.
Европейским Союзом в настоящее время разрабатывается собственная спутниковая навигационная система Галилео, аналогичная системам GPS и Глонасс. Начало эксплуатации системы Галилео планируется с 2008 года. Совместное использование ресурсов всех космических навигационных систем повысить точность и достоверность определения местоположения подвижных объектов любого типа - морских, воздушных, сухопутных.
Источники ошибок в GNSS
Основными факторами, которые определяют точность определения местонахождения, являются следующие.
1. Неоднородность ионосферных и тропосферных слоев Земной атмосферы. Точность измерений зависит от постоянства скорости распространения радиоволн. Однако из-за различного рода нсоднородностей в атмосфере скорость может меняться. В результате возникают ошибки в определении расстояний до спутников. Абсолютные ошибки, вызванные влиянием атмосферы составляют порядка 5 метров (для ионосферных ошибок) и 1 метра (для тропосферных ошибок.
2. Многолучевость распространения радиоволн. Приемник GPS принимает не только радиоволны по прямому направлению, но и отраженный от каких-либо объектов - рельефа, самолетов, крупных зданий и т.д. Отраженные сигналы создают дополнительные помехи, влияющие на точность измерения.
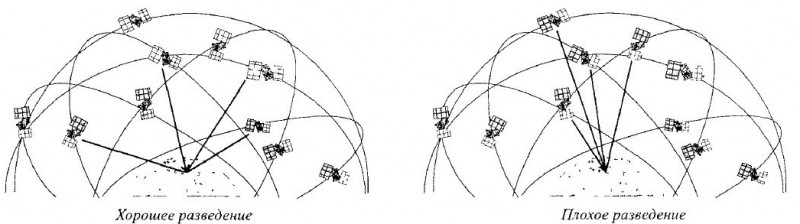
Рис.30.2. Хорошее и плохое разведение спутников при обсервации
3. Ошибки синхронизации. Для точного измерения задержки сигнала от спутника необходима синхронизация приемника. На спутниках имеется атомный эталон частоты, который синхронизирует приемник GPS. Нестабильность атомного эталона обуславливаем ошибку в измерении задержки прохождения cигнала и точность позиционирования порядка 1,5 метров.
4. Эфемеричсские ошибки вызваны неточностью расчета положения спутника в пространстве. Их влияние составляет порядка 2,5 метров при определении положения приемника.
5. Геометрическое разведение спутников. Если спутники, па которые производится обсервация находятся под углами близкими к прямым, то точка пересечения окружностей может быть вычислена с меньшей погрешностью, чем в случае, когда спутники находятся под острыми углами. Хорошее взаимное положение (разведение) (Good dilution) спутников позволяет получить меньшую погрешность, чем плохое разведение (Poor dilution) (рис. 30.2).
6. Солнечная активность. Вспышки па Солнце, которые сопровождаются выбросами гигантских масс солнечного вещества, порождают резкие изменения свойств магнитосферы и ионосферы Земли. Такие вспышки повгоряются с цикличностью примерно 11 лет при относительно спокойном состоянии Солнца между ними. В периоды солнечной активности ошибки возрастают.
Рис.30.3. Источники ошибок в GNSS
7. Избирательная возможность путем засекречивания кодов. Преднамеренно точность измерений может ухудшаться путем засекречивания точного кода. Коммерческий короткий код позволяет получить точность примерно на порядок хуже, чем длинный код для военных применений.
При вычислении координат особое значение приобретает используемая геодезическая координатная система. В различных геодезических системах точки с одними и теми же координатами могут отстоять на сотни мет- ров. GPS для расчета координат использует систему WGS84 (World Geodetic System), а Глонасс - Советскую геоцентрическую систему параметров Земли 1990 года PZ90.
Дифференциальный режим GPS/Глонасс
Спутниковые навигационные системы Глонасс и GPS не позволяют обеспечить в штатном режиме точность, необходимую для безопасной навигации судов на подходах к портам и в узкостях с ограничением свободы маневрирования судов. В этой зоне точность регламентируется Резолюцией ИМО А.815(19) 1995 года по Всемирной радионавигационной системе. Эта точность не должна быть хуже 10 метров с вероятностью 95%.
Другим недостатком спутниковых навигационных систем является неспособность в настоящее время обеспечивать оперативное оповещение потребителей о нарушениях в работе систем или их элементов, которые про- исходят пока довольно часто.
Наиболее рациональным путем устранения указанных недостатков и улучшения точностных характеристик систем Глонасс и GPS, необходимых для расширения их функциональных возможностей, является применение дифференциального режима работы.Сущность дифференциального режима поясняется следующим образом. Ошибки в спутниковых навигационных системах для измерений, сделанных в данное время и данном месте, носят, главным образом, систематический характер.
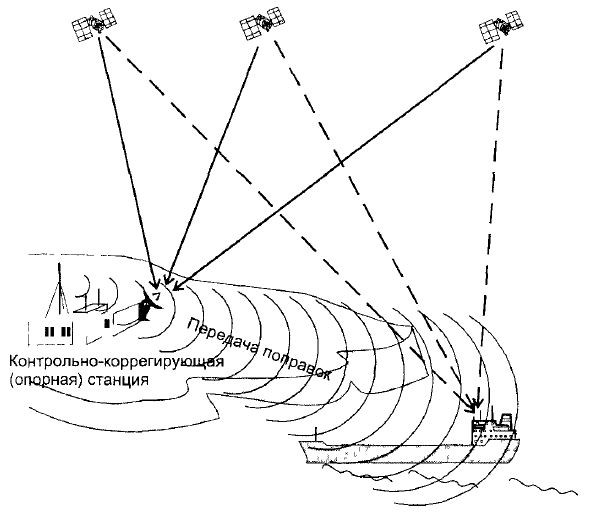
Поэтому, если привязаться к какой-либо точке на берегу с точно известным географическим положением и измерить се местоположение с помощью навигационного приемника GPS/Глонасс, то можно получить некоторое значение поправки. Это значение поправки следует далее ввести в полученное измерение местоположения судна.Различают два метода использования поправок. Первый метод (называемый дифференциалом положений) базируется на вычислении разности расчетного положения и точно известного положения опорной точки. Роль опорной точки выполняет опорная (или контролыю-коррегирующая) станция. Однако в данном методе необходимо при обсервации на судне использовать те же спутники, что и на опорной станции.
Другой метод (дифференциал псевдорасстояний) предполагает получение ошибок вычисления псевдорасстояний для каждого спутника. Достоинством данного метода является независимый от опорной станции выбор "созвездия" на судне благодаря наличию поправок псевдодальностей по всем спутникам.
Данный метод практически используется в дифференциальном режиме. Коррекции псевдорасстояний рассчитываются на береговой опорной станции и передаются в диапазоне средних волн 285-325 кГц для всех заинтересованных пользователей. Интервал передачи поправок составляет не более 5-10 секунд. Поправки вводятся в судовой приемник GPS и учитываются при расчете местоположения судна.Погрешности определения места увеличиваются с увеличением расстояния от опорной станции и при старении дифференциальных поправок, но не должны превышать 10 метров в рабочей зоне с вероятностью 0,95.
Рис.30.4. Дифференциальный метод измерения координат
В дифференциальном режиме одновременно повышается надежность работы системы за счет оперативного извещения всех пользователей о возможных нарушениях в спутниковой системе.
Принцип действия дифференциальной системы иллюстрируется на рис. 30.4. На береговой станции измеряются координаты с помощью приемника GPS и сравниваются с точно известными координатами положения приемника. На основании этого рассчитываются поправки, которые необходимо ввести в измеренные координаты на судне.
Поправки передаются в диапазоне средних волн. Прием поправок возможен на расстояниях примерно 50 - 250 м. миль от передающей станции. Для передач используется класс излучения G1D при модуляции с минимальным сдвигом (MSK). На судне должен быть установлен приемник дифференциальных поправок и приемник GPS с входом дифференциальных поправок.
Дифференциальный режим является наиболее перспективным для обеспечения плавания в узкостях, каналах и подходах к портам, а также позволяет успешно решить следующие специальные навигационные задачи:
- обеспечение высокоточного судовождения на внутренних водных путях;
- рыбный промысел в прибрежных водах, узкостях и в районах со сложной навигационной обстановкой;
- геодезические и другие научные исследования;
- прокладка кабелей и трубопроводов как в прибрежных водах, так и в открытом море;
- добыча полезных ископаемых и проведение необходимых изыскательских работ и др.
В настоящее время в более чем 20-ти странах эксплуатируются более 200 опорных станций дифференциальной подсистемы GPS/Глонасс.
Список и координаты опорных станций приведены в ALRS, vol 8, Satellite Navigation Systems.
ГНСС Galileo
Глобальная спутниковая навигационная система Galileo - масштабный западноевропейский проект, разрабатываемый Европейским космическим агентством в сотрудничестве с Европейским союзом.
Проект Galileo обеспечит Европу собственной глобальной спутниковой навигационной системой, позволяющей с высокой точностью определять местоположение объекта и гарантирующей глобальное покрытие. Она будет обеспечивать перспективные потребности авиационного, морского, железнодорожного и автомобильного транспорта Европейского союза, а также других стран. С ее помощью можно будет точно устанавливать местонахождение воздушного или морского судна, регулировать транспортные потоки, проводить спасательные операции.
Европейская система спутниковой навигации Галилео
Создаваемая система Galileo станет третьей в мире по счету глобальной системой космического позиционирования. Сейчас только США (система GPS) и Россия (система Глонасс) обладают подобными космическими сетями, позволяющими определять с помощью системы спутников точное местонахождение объекта на Земле.
Политическое значение этого проекта заключается в том, что Galileo станет конкурентом американской системы GPS и подорвет монополию США в этой области. Вашингтон предпринял перед ЕС ряд шагов, призывая его опереться на американскую систему.
Однако после многих колебаний и согласований страны ЕС на саммите в Барселоне все же решили сделать ставку на Galileo. Пo словам одного из руководителей Европейской комиссии, собственная спутниковая система позволит Европе сохранить свою автономность, суверенитет и технический потенциал.Какими причинами обусловлено создание новой системы глобального позиционирования? Пользователи спутниковой навигации в Европе сегодня для определения своего положения не имеют альтернативы помимо существующих систем GPS и Глонасс. Но военные операторы обеих указанных систем не гарантируют постоянного и непрерывного предоставления услуг.
В то же время спутниковая навигация уже сегодня стала обычным способом определения местоположения на море, а в ближайшем будущем следует ожидать его столь же широкого распространения на суше и в воздухе. И если завтра сигнал по каким-то причинам будет отключен, то штурманам морских судов придется вернуться к традиционным методам навигации с использованием секстантов и навигационных таблиц. А еще через несколько лет зависимость от ГНСС станет такова, что последствия исчезновения сигнала могут оказаться еще более серьезными, и затронут уже не только экономическую эффективность использования транспортных средств, но и их безопасность. Поэтому в начале 1990-х годов Европейский Союз посчитал необходимым наличие собственной европейской глобальной спутниковой навигационной системы.Система Galileo будет предоставлять беспрецедентную для гражданских средств точность позиционирования до 1 м в режиме реального времени, гарантировать доступ к сервису при всех обстоятельствах, за исключением особо экстремальных, и информировать пользователя в течение нескольких секунд об отказе любого спутника. Это делает се незаменимой при решении таких задач, как управление движением поездов или посадкой самолетов, где обеспечение безопасности особенно критично.
Развертывание Galileo позволит странам Евросоюза провести существенные усовершенствования в системах управления движением всех видов транспорта, а также в коммерческих, индустриальных и других стратегических областях.
С технической точки зрения система Galileo представляет собой флотилию из тридцати (27 действующих и 3 резервных) спутников, работающих в том же диапазоне частот, что и американская система GPS. Орбиты спутников - круговые высотой 23616 км и наклонением 56°. Это наклонение чуть выше, чем у спутников системы GPS (55°), но значительно меньше, чем в системе Глонасс (64,8°).
Тем не менее, их сигналы будут обеспечивать надежное покрытие поверхности Земли вплоть до широты 75° (мыс Нордкап - северная конечность Норвегии) и даже в более высоких широтах. Большое число аппаратов, оптимизация их размещения на орбитах и наличие трех активных резервных спутников, гарантируют, что даже потеря одного из них не будет заметна для пользователя. Еще одно заявленное преимущество системы Galileo - возможность точного определения положения объектов в крупных городах, где здания экранируют сигнал со спутников, находящихся низко над горизонтом. Она достигается за счет того, что число аппаратов, доступных для использования при позиционировании, в два раза больше минимально необходимого.Для осуществления контроля функционирования спутников и управления навигационной системой на территории Европы предполагается построить два специализированных центра управления GCC (Galileo Control Centre).
Сюда будет стекаться информация, передаваемая двадцатью наземными станциями слежения GSS (Galileo Sensor Station). Центры GCC также будут осуществлять синхронизацию шкал времени на всех спутниках и наземных станциях. Обмен данными между центром управления и космическим сегментом будет осуществляться с помощью пяти передающих станций, работающих в S-диапазоне, и 10 станций, работающих в С-диапазоне.